
方案概述:
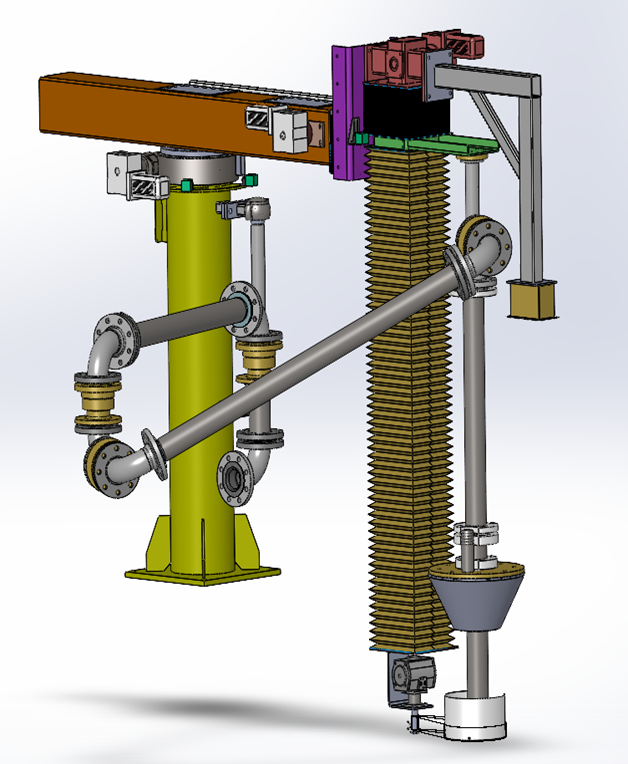
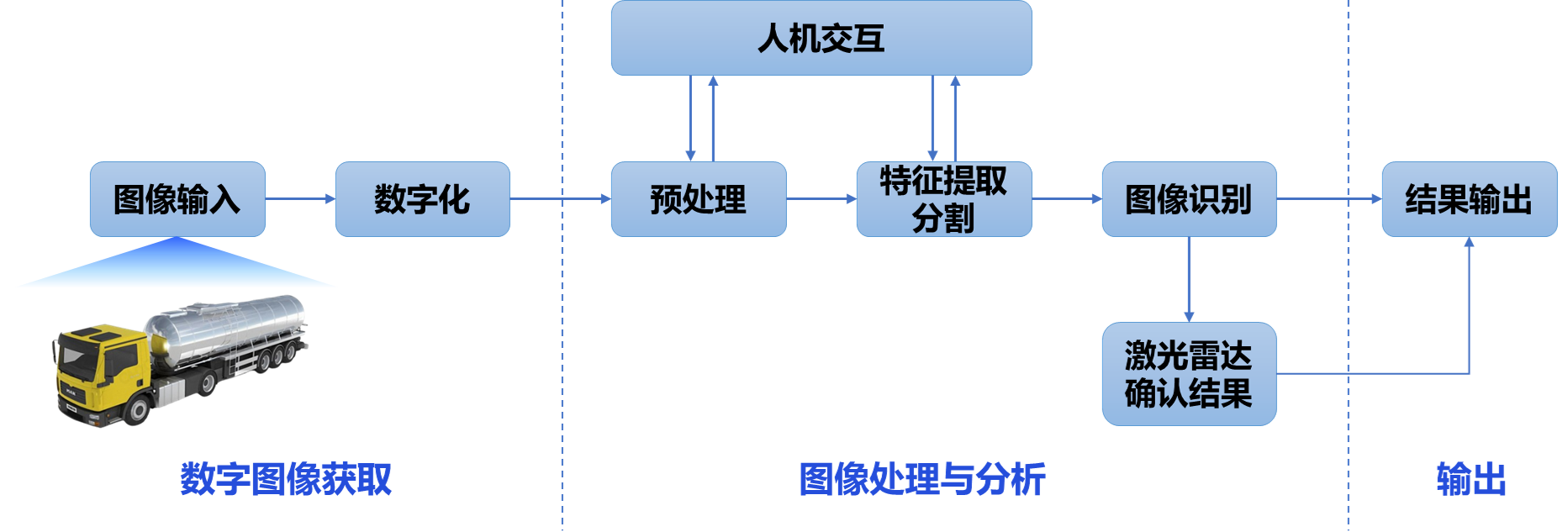
智能鹤管采用电动伺服驱动,定位方案为视觉识别。配件包含鹤管本体、操作控制箱、伺服电机、电机减速器、升降模组、水平模组、旋转模组、鹤管限位检测等功能控制系统采用西门子PLC主控,彩色显示屏。系统集成定量模块、电磁流量计、电动调节阀、钥匙管理模块、液位报警模块、吹扫模块、泵控制模块等部分。基于视觉系统的定位算法主要是通过采集罐口特征信息,经过软件深度学习,根据罐口特征自动识别罐口区域。此种算法比之前使用的模板匹配的方式更加可靠,通过以图找位的方式可靠性得到了很大提升,可避免95%以上因为光源和角度问题带来的定位误差。
车辆进入厂区,在业务站登记装酸信息(发卡),现场刷卡发起装酸需求,系统自动下发装酸量,鹤管自动寻口,插入后开始灌装。自动控制装酸阀门开启,启动装酸泵,流量计计量到预装量后自动关闭控制阀。装酸泵为变频控制,与现场装酸口开启数量连锁,自动控制装酸泵频率,地下槽液位低联锁停止装酸泵运行。装酸泵出口设置回流管、自力式调压阀。地下槽液位、进酸阀控制由DCS控制。
智能鹤管三维结构:
智能自动对位系统:
基于视觉系统的定位算法主要是通过采集罐口特征信息,经过软件深度学习,根据罐口特征自动识别罐口区域。此种算法比之前使用的模板匹配的方式更加可靠,通过以图找位的方式可靠性得到了很大提升,可避免95%以上因为光源和角度问题带来的定位误差。使用单目视觉和偏移坐标系作为辅助信息,利用三角法计算特征点在当前鹤管坐标系中的坐标位置,消除了使用绝对坐标系时的累积误差,使得定位的结果更加精确。
视觉建立坐标系后,记录罐口位置,并将位置信息发送给控制系统,通过伺服系统,进行运动控制,由编码器、激光测量仪实时反馈鹤管当前位置,并与系统坐标系实时效验,以保系统对鹤管行进位置实时控制。当鹤管行进到槽车罐口正上方,位置检测传感器向系统反馈当前位置与目标位置一致,鹤管放入罐口,自动对位完成。
建设成效:
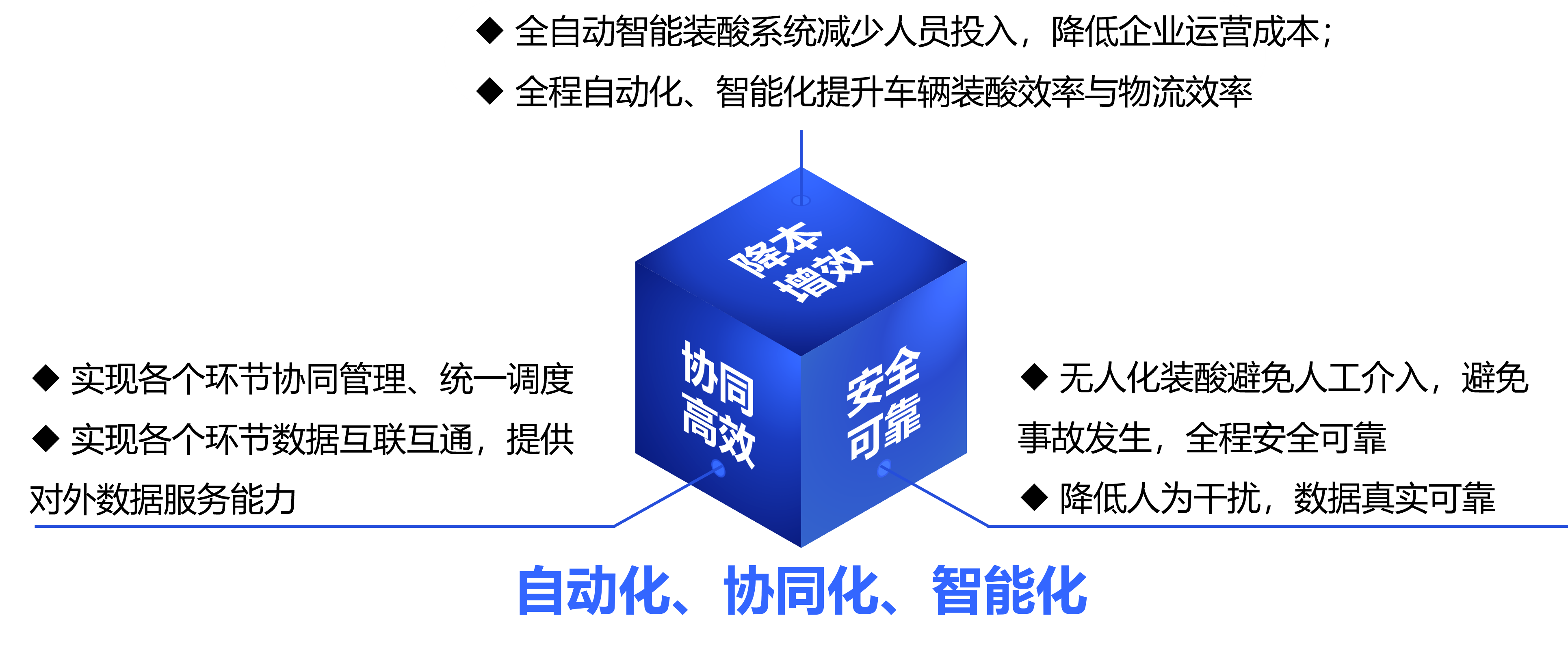
自动装酸系统的整体建设为企业的数字化、智能化、协同化管理的提升提供很大的助力,帮助企业快速、高效、协同的进行装酸过程的管控,为企业的安全生产、降本增效提供强有力的保障。
上一篇智能巡检机器人解决方案


微信公众号

微信在线咨询
Copyright © 2016 北京麦斯时代信息技术有限公司 版权所有 备案号:京ICP备08011755号-1 版权声明 隐私保护 联系我们
